

Le nuove invenzioni della Scuola Superiore Sant’Anna finiscono su una rivista internazionale e stupiscono per le loro prestazioni
Saltano come insetti, accumulano energia dall’ambiente e la riutilizzano per ripartire. Non è fantascienza, ma una delle linee di ricerca più avanzate portate avanti alla Scuola Superiore Sant’Anna di Pisa, dove la robotica sta guardando sempre più da vicino al mondo naturale per risolvere problemi ingegneristici complessi su scala microscopica.
Al centro di questo filone c’è la robotica biomimetica, in particolare quella ispirata agli insetti. A raccontarne lo stato dell’arte è lo studio “Jump, Recharge, Repeat: Insect-Inspired Jumping Robots and the Challenge of Energy Harvesting”, pubblicato su Science Robotics e firmato, tra gli altri, da Donato Romano, professore associato all’Istituto di Biorobotica della Sant’Anna. Il lavoro analizza una nuova generazione di robot miniaturizzati progettati per muoversi tramite salti ad alta potenza e, soprattutto, per ricaricarsi sfruttando direttamente l’ambiente.
Il punto di partenza è l’osservazione della natura. Molti insetti sono in grado di compiere salti impressionanti rispetto alle loro dimensioni corporee. Lo fanno grazie a strutture biologiche che immagazzinano energia elastica e la rilasciano in una frazione di secondo, generando picchi di potenza molto superiori a quelli che i muscoli umani potrebbero produrre in modo continuo. Trasferire questo principio nella robotica significa progettare meccanismi capaci di accumulare energia lentamente e rilasciarla in modo rapido ed efficiente, ottenendo movimenti esplosivi con sistemi estremamente compatti.
Dal punto di vista ingegneristico, questi robot saltatori rappresentano un netto cambio di paradigma rispetto ai sistemi tradizionali su ruote o zampe. Il salto consente di superare ostacoli sproporzionati rispetto alla scala del robot, di muoversi su terreni irregolari e di ridurre il contatto prolungato con superfici instabili. In pratica, più il robot è piccolo, più il salto diventa una soluzione locomotoria efficace.
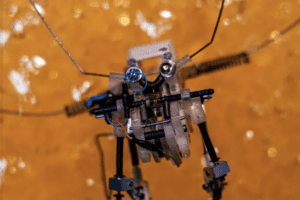
Robot Insetto dalla Scuola Sant’Anna di Pisa
La vera sfida, però, non è solo farli saltare, bensì alimentarli. I robot di questo tipo richiedono picchi di potenza molto elevati, difficili da sostenere con batterie miniaturizzate, che hanno capacità limitata e tempi di ricarica lunghi. È qui che entra in gioco uno dei temi chiave dello studio: l’autonomia energetica. Alla Sant’Anna e in altri laboratori internazionali si stanno sperimentando diverse strategie di energy harvesting, cioè la capacità di convertire energia presente nell’ambiente in energia elettrica utilizzabile.
Tra le soluzioni analizzate ci sono i nanogeneratori triboelettrici, che sfruttano il contatto e la separazione tra materiali diversi, i materiali piezoelettrici, capaci di generare corrente quando vengono deformati, e le microcelle solari, pensate per funzionare anche in condizioni di luce non ottimali. L’idea è che il robot possa ricaricarsi lentamente tra un salto e l’altro, accumulando energia sufficiente per la successiva fase di movimento.
Questa combinazione di mobilità estrema e auto-rifornimento energetico apre scenari applicativi molto concreti. Robot di questo tipo potrebbero essere impiegati nell’esplorazione di ambienti difficilmente accessibili, come superfici planetarie, aree colpite da disastri naturali o ecosistemi delicati da monitorare senza interferenze invasive. Su scala ancora più avanzata, si ipotizza l’utilizzo in sciami di robot, capaci di cooperare come colonie di insetti, condividendo informazioni e coprendo ampie aree con un consumo energetico minimo.
Restano, naturalmente, diverse sfide aperte. La resistenza dei materiali sottoposti a sollecitazioni ripetute, la miniaturizzazione dei sistemi di accumulo energetico e l’integrazione di algoritmi intelligenti a bassissimo consumo sono tutti nodi ancora in fase di sviluppo. Ma il quadro che emerge dallo studio è chiaro: i robot ispirati agli insetti non sono più solo prototipi da laboratorio, bensì dispositivi sempre più maturi.



